


这几个技术的目的都是让人脱离汽车的约束,让汽车可以自己跑。

自动驾驶就不用说了,自然是希望汽车能实现全域的“脱离”能力。不过自动驾驶行业的“水很深”,一些企业总会偷换概念地说自己有自动驾驶能力,比如只能在高速路上实现自动驾驶,或者只能在有高精度地图网络覆盖的特定路段实现自动驾驶等。
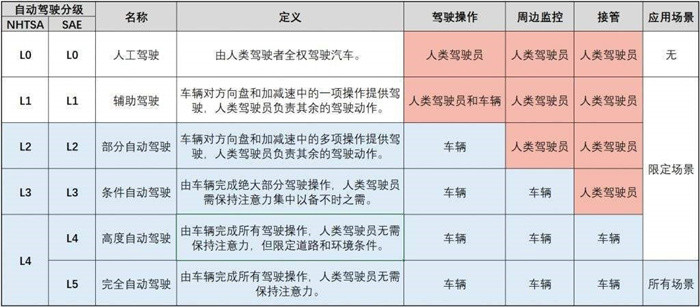
所以一些官方机构就出来维持秩序了,SAE(美国汽车工程师学会,是国际上最大的汽车工程学术组织)笑到了最后。SAE对自动驾驶能力进行了划分,如下图所示,SAE L0就代表的是普通汽车,SAE L5就代表的是全域自动驾驶,汽车可以在任何情况下自己行驶。
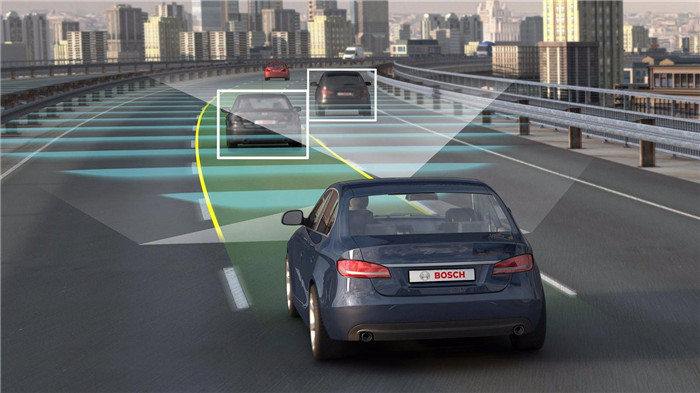
自动驾驶之后就是自适应巡航了,自适应巡航是SAE L2级别中很重要的一个功能。简单来说,当设定好所希望的车速后,系统会利用低功率雷达或红外线光束探测前方(一般200米左右)道路情况,如果发现前车减速或监测到新目标,系统降低速度来保持安全车距,当前方道路没车时又会加速恢复到设定的车速。
而定速巡航的“脱离”能力就要更低一些了,顾名思义它只能维持在一种车速上,无法像自适应巡航那样把控油门和刹车的能力。
以上我们是从“脱离”能力来对比的。换一个角度看,自动驾驶是要结合很多种技术能力才能实现的目标,比如需要更多的雷达、摄像头,更强的处理器,甚至还要更强的网络(5G)、更强的地图(如高精度地图)等。但自适应巡航也好,定速巡航也好,它们都是很单一的一项能力,范围可是要比自动驾驶小得多。